CENTER OF MASS
The center of mass of a body or a system of particles is defined as the point where all the mass of the body or all the masses of the system of particles seem to be concentrated. In physics, the center of mass can be said to be the point in space at the center of the mass distribution (also known as the equilibrium point) where the sum of the weighted relative positions of the distributed mass is zero. Simply put, the position of the center of mass is relative to the object. We can say that it is the average position of all parts of the system or the average position of the mass distribution in space. This is the point where force is usually applied, resulting in linear acceleration with no angular acceleration.
The movement of this single point is identical to the movement of a single particle whose mass is equal to the sum of all the individual particles of the system and the result of the forces exerted on all the particles of the system by all the surrounding bodies or particles. The force field is directed directly at that particle. This point is called the center of mass of the system of particles. The concept of center of mass (COM) is useful in analyzing the complex motion of a system of objects, especially when two or more objects collide or the object explodes into pieces.
Center of gravity
The center of gravity can be taken as the point through which gravity acts on an object or system. Basically, it is the point around which the torque due to gravitational forces disappears. In cases where the gravitational field is assumed to be uniform, the center of gravity and the center of mass are the same. Sometimes the two terms - center of gravity and center of mass - are used interchangeably, as they are often said to be in the same place or location.
System of Particles:
The term particle system refers to a well-defined collection of large numbers of particles that can exist or interact with each other or are connected to each other. They can be real particles of rigid bodies in translational motion. Interacting particles exert forces on each other.
Those forces of mutual interaction between the particles of the system are called the internal force of the system. These internal forces are always equal in magnitude and in opposite directions. In addition to internal forces, external forces can act on all or some of the particles. Here, the term external force refers to the force acting on any particle introduced into the system by another body external to the system. What is a rigid body? In practice, we deal with extended bodies that can be deformable or non-deformable or rigid. An extended body is also a system in which there is an infinite number of particles with an infinitesimally small distance between them. When a body is formed, the distance between its particles and their relative position changes. A rigid body is an extended object in which the differences and relative positions of all its constituent particles remain the same under all conditions. It is the average position of all the parts of the system, weighted by their mass. The center of mass of a rigid object of simple uniform density is in the center of gravity.
Determining the center of mass
If we want to experimentally determine the center of mass of a body, we can use the gravitational forces acting on the body. This can be done mainly because the center of mass is the same as the center of gravity in a parallel gravitational field near the ground. In addition, the symmetry axis and the center of mass of a body with constant density are located on this axis. Similarly, the center of mass of a circular cylinder of constant density is on the axis of the cylinder. If we are talking about a spherically symmetric body with constant density, then its COM is located in the center of the sphere. If we talk about it in a general context, for the symmetry of anybody, its center of mass is mostly a fixed point of that symmetry.
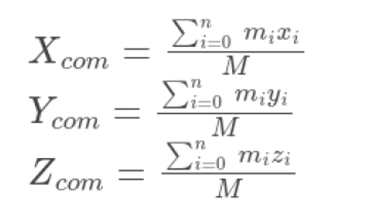
The Formula for the Center of Mass:
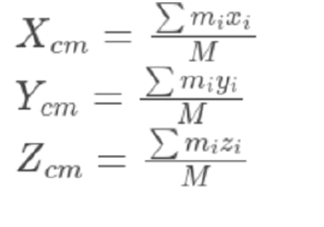
We can extend the formula to a system of particles. The equation can be applied to each axis separately,
The above formula can be used if we have point objects. But we have to take a different approach when we have to find an extended object like the center of mass of a stick. We have to look at the differential mass and its location and then integrate it along.
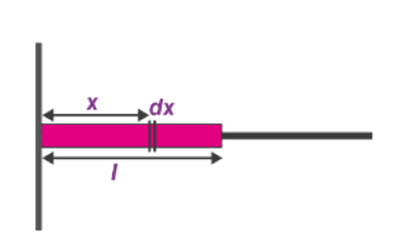
Suppose we have a rod, as shown in the figure, and we have to find its centre of mass.
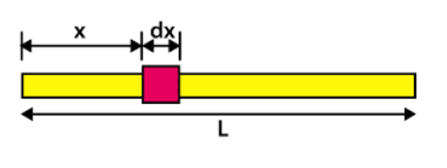
Centre of mass of rod
Let the total mass of the rod be M, and the density is uniform. Also, we assume that the breadth of the rod is negligible, i.e., the centre of mass lies on the x-axis. We consider a small dx at a distance from the origin. Therefore,
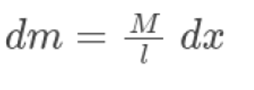
Using the equation for finding the centre of mass,
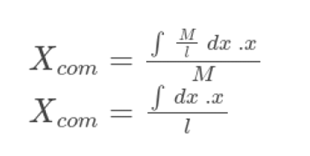
Integrating it from 0 to l, we get,
Using the above method, we can find the centre of mass for any geometrical shape. You can try out a semi-circular ring or a triangle. So, if a force is applied to that extended object, it can be assumed to act through the centre of mass, and hence, it can be converted to a point mass.
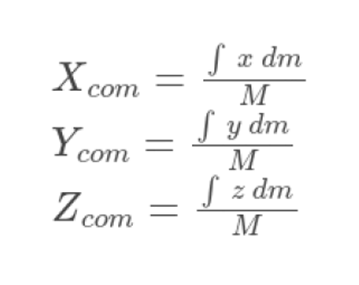
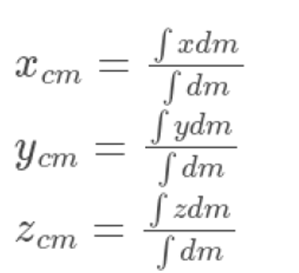
Centre of mass of a body having continuous mass distribution
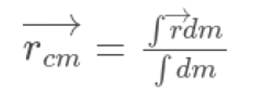
If the given object is not discrete and their distances are not specific, then the centre of mass can be found by considering an infinitesimal element of mass (dm) at a distance x, y and z from the origin of the chosen coordinate system,
In vector form,
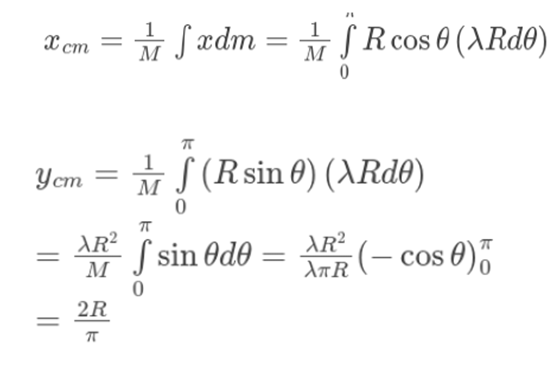
Centre of mass for a semi-circular ring of radius (R) and mass (M):
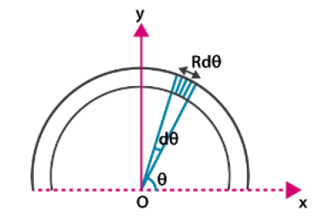
Consider a differential element of length (dl) of the ring whose radius vector makes an angle θ with the x-axis. If the angle subtended by the length (dl) is dθ at the centre, then
![]()
Then the mass of the element is dm,
![]()
Since
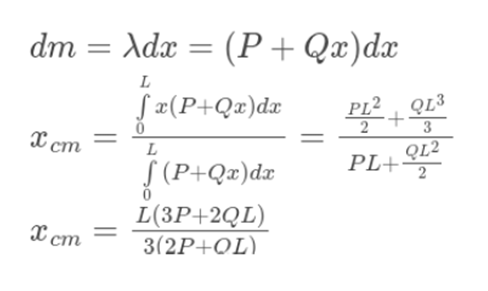
Q. If the linear mass density of a rod of length (L) lying along the x-axis and origin at one end varies as
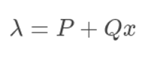
Where P and Q are constants, find the coordinates of the centre of mass.
The rod lies along the x-axis, hence
For
xcm:
Consider a small element of (dx) at a distance x from one end of the rod
Mass of the element
Hence, the coordinates of the centre of mass are
Centre of Mass of a Thin Uniform Disc of Radius (R):
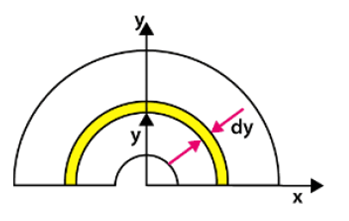
The disc is an analogy of a ring. We are considering an elemental ring at y distance from origin and thickness dy.
As we know, xcm = 0 (for a ring)
Now for disc
The disc is a combination of N number of elemental rings.
ycm for a disc is

System of Particles and Centre of Mass
Till now, we have dealt with the translational motion of rigid bodies where a rigid body is also treated as a particle. But, when a rigid body undergoes rotation, all of its constituent particles do not move in an identical fashion. Still, we must treat it as a system of particles in which all the particles are rigidly connected to each other.
On the contrary, we may have particles or bodies not connected rigidly to each other but maybe interact with each other through internal forces. Despite the complex motion of which a system of the particle is capable, there is a single point known as the centre of mass or mass centre whose translational motion is characteristic of the system.
Centre of Mass of a System of Particles:
For a system consisting of n particles, having masses
m1,m2,m3,…mn
and their position vectors
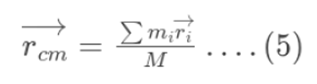
respectively with respect to the origin of the chosen reference frame, the position vector of the centre of mass is rcm with respect to the origin is,
Here

m1+m2+m3+…+mn=M
M is the total mass of the system,
Then,
Here, m1+m2+m3+…+mn=M
M is the total mass of the system,
![]()
Let an instant a system consists of a large number of particles
m1,m2,m3,…mn
and their position vectors from the origin of the chosen reference frame
![]()
changes as time passes, which indicates the system is in motion. At that instant particles of such system
m1,m2,m3,…mn
located at
![]()
are moving with velocity
![]()
So the mass system of center located
![]()
The mass centre motion represents the translational motion of the whole system. The sum of all particles’ linear momentum must be equal to the linear momentum of the whole mass of the system due to the translational motion of the centre of mass or mass centre.
We can also write the above equations (1) and (2) as follows:
In the above equation (3), the location of the centre of mass of a system of particles or discrete particles is as follows:
Two Particle Systems:
Let us consider a system consisting of two particles of masses and their position vectors
r1and r2 separation distance between them is d.
Position of centre of mass unaffected in the absence of external force.
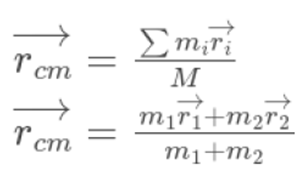
Let us assume their centre of mass located at rcm→
from the above eq (5)
Let us assume the origin at centre of mass (COM) vector rcm→.
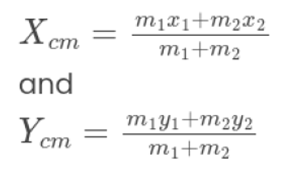
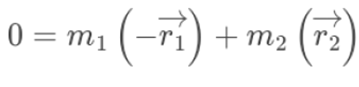
Both particles lie on the x-axis. Let the COM will also lie on the x-axis.
Then rcm Vanishes.
![]()
Either of the masses, m1 and m2, cannot be negative. Then, to satisfy the above relation,
Then
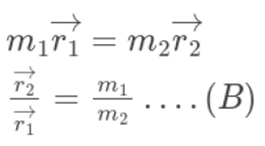
From the eq (B)
![]()
As we know, the separation distance between them is d,
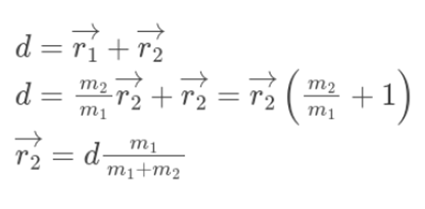
Similarly
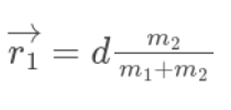
This concludes that the centre of mass of the two-particle system lies between the two masses on the line joining them and divides the distance between them in the inverse ratio of their masses.
Centre of Mass of the System with Cavity
If a part of a body is taken out, the remaining part of the body is considered to have
Existing mass = [{original mass (M)} + {-mass of the removed part (m)}]
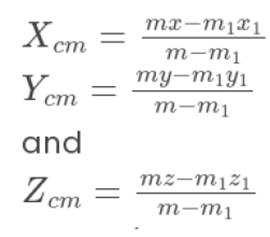
Suppose there is a body of total mass m, and a mass m1 is taken out from the body. The remaining body will have mass (m – m1), and its mass centre will be at coordinates.
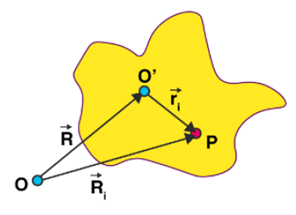
Centre of mass of an extended object (Continuous distribution of mass):
An extended body is a collection of a large number of particles closely located; their distances are not specific, and we assume the body as a continuous distribution of mass. Consider an infinitely small portion of mass dm of the body, which is known as a mass element. The position vector of the centre of mass of such an object is given by,
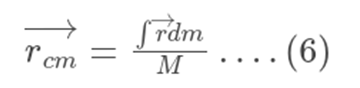
Its components in the Cartesian coordinate system are as follow,

A system consists of n number of particles having masses
m1,m2,m3,…mn and the total mass of the system is M. From the definition of centre of mass,
![]() … (1)
… (1)
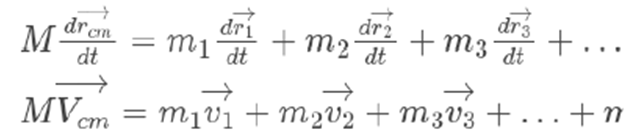
If the mass of each particle of the system remains constant with time, for this system of particles with fixed mass, differentiating the above eq with respect to time, we get
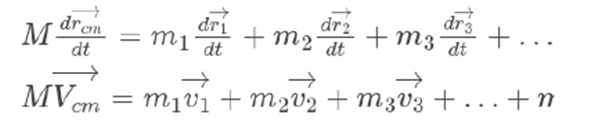
Differentiating the velocity expression, we will get,
Where
The force Fi acting on the ith particle is given by,
![]()
The above eq (5) can be written as,
 … .(6)
… .(6)
Where F1, F2, F3, and Fn are the forces acting on the individual particles 1, 2 and 3 … n of the system.
The internal forces are the forces exerted by the particles of the system on each other; however, from Newton’s third law, these internal forces occur in pairs of equal magnitude and opposite directions. So, their net sum is zero. Then, the above eq (6) becomes

Eq (7) states that the COM of the system of particles behaves like all the mass of the system were concentrated there, and the resultant of all the external forces acting on all the particles of the system was applied on COM.
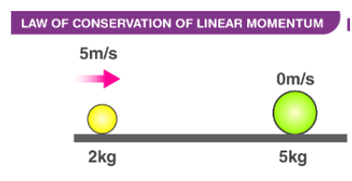
Conservation of linear momentum
According to the conservation of linear momentum
If the net external force acting on a system of bodies is zero, the momentum of the system remains constant.
We must remember that the momentum of the system is conserved, not the momentum of the individual particles. The momentum of the individual bodies in the system may increase or decrease depending on the situation, but the momentum of the system is always conserved as long as there is no external net force acting on it.
The principle of conservation of momentum states that when two objects collide, the total momentum before and after the collision is the same ifno external force acts on the colliding objects.
The linear momentum conservation formula mathematically states that the momentum of a system remains constant when the net external force is zero. Initial Torque = final torque
Pi = Pf
Formula of linear momentum
Linear impulse is expressed mathematically as:
Equation of conservation of linear momentum
The law of conservation of momentum can be explained by another law of motion. Newton's second law of motion states that the rate of change of the linear momentum of a body is equal to the pure external force applied to the body.
Mathematically, this is expressed as:

If the net external force acting on the object is zero, the rate of change of momentum is also zero, meaning that momentum does not change.
An example of conservation of linear momentum
Two bodies with masses M and m move in opposite directions with speeds v. If they collide and move together after the collision, the velocity of the system must be found. Since the two-body system has no external force, momentum is conserved.
Initial Torque = Final torque
(Mv – mv) = (M+ m)VFinal
From this equation, we can easily find the terminal velocity of the system.
Conservation of linear motion applications
One application of conservation of momentum is rocket launch. The burning of the rocket fuel pushes the exhaust gases down and as a result the rocket is pushed up. Motorboats also work on the same principle, pushing water backwards and forwards to save speed.
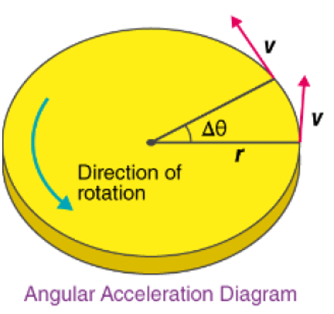
Relationship between linear velocity and angular velocity
Consider a body of random shape undergoing rotational motion as shown in the figure below. The linear velocity of a particle is proportional to the angular velocity. Considering the rotational motion of a rigid body around a fixed axis, the extended body is treated as a system of particles moving in a circle located in a plane perpendicular to the axis, because the center of rotation is located on the axis.
Angular velocity
In this figure, a particle P is shown rotating about a fixed axisthrough O. Here, the particle represents a circle on the axis. The radius of a circle is the perpendicular distance between the point P and the axis. The angle indicates the angular displacement Δθ of a given particle in time Δt. The average angular velocity at time Δt is Δθ/Δt. As Δt tends to zero, the ratio Δθ/Δt reaches a limit called the instantaneous angular velocity dθ/dt. The instantaneous angular velocity is denoted by ω. Based on the knowledge of circular motion, it can be said that the magnitude of the linear velocity of a particle moving in a circle is related to the angular velocity of the particle ω through the ratio υ/ω= r, where r is the radius. At any moment, the relation v/r = ω is valid for every particle with a rigid body.
If the perpendicular distance of the particle from the fixed axis is ri, the linear velocity at a given instant is v by the relation,
![]()
Therefore, we can write the linear velocity expression for n different particles forming the system. According to the expression, we can say that the tangential speed of the particles located on the axis is zero when the radius is zero. Furthermore, the angular velocity ω is a vector quantity that is constant for all the particles that make up the motion.
Angular Acceleration:
Angular acceleration is defined as the rate of change of angular velocity over time. It is usually expressed in radians per second per second. Therefore
Angular acceleration is also called rotational acceleration. It is a quantitative expression of changes in angular velocity per unit time. Angular acceleration
Angular acceleration is a pseudo scalar. The sign of the angular acceleration is considered positive when the angular velocity increases counterclockwise, and negative when the angular velocity increases clockwise. The motion of rotating objects such as wheel, fan and earth is studied using angular acceleration.
Angular movement
Unit of angular acceleration
The direction of the acceleration vector is perpendicular to the plane in which the rotation occurs. Increasing angular velocity clockwise, with the angular acceleration directed away from the observer. If the increase in angular velocity is counterclockwise, the angular acceleration vector points toward the viewer.
In SI units, angular acceleration is measured in radians per second squared (rad/s2) and is usually denoted by alpha (α).
Angular acceleration formula
Angular velocity is the rate of change of angular position of a rotating body and is expressed as:
Where ,
θ = twist angle
t = elapsed time
If the angular velocity is constant, the angular acceleration is 0. If the velocity is not constant, the constant α is defined as:
If the angular acceleration is not constant and changes from time to time, then:
and
Torque and Angular Momentum
In a rigid body, motion is usually both rotational and translational. When the body is fixed at one point, the motion is usually rotational. It is known that a force is required to change the translational state of a body and give it linear acceleration. Momentum and angular momentum are the rotational equivalents of force and momentum. These units help us change the rotational state of the body. Torques and angular moments are very useful and are encountered almost everywhere in everyday life. The power of an engine and motors is measured by torque. Thus, when studying any rigid body, it is important to understand the concepts of torque and angular momentum. Let's look at these concepts in more detail.
Torque
Torque is analogous to force in reciprocating motion. Consider the example of a door. The position of the door is fixed; it can only rotate around its axis. So what makes the door turn?
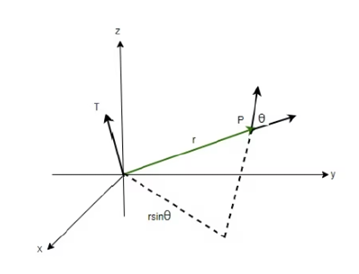
Force is needed, but force applied to the door hinge does not work. So it is not only a force but also the position to which it is applied. In rotary motion, the equivalent force is torque. It is also called torque. This causes angular acceleration in the body, which means forcing the body to change its rotational state. Let the particle P be far from the origin at a point whose position vector is given
When a force F acts on a particle, the torque is obtained as follows:
Since the cross-product is involved, it is a vector quantity. The amount of torque is determined by the formula,
![]()
Here "r" is the magnitude of the position vector and θ is the angle between the position vector and the force. In the formula, the part "rsinθ" is thedistance of the force perpendicular to the axis of the rigid body.
Dimensions of torque are given by ML2T-2. They are also measures of energy, but these quantities should not be confused with each other. They come in very different sizes. The unit of torque is N-m. The angularmomentum of a particle
It was mentioned that torque is analogous to force. Similarly, angular momentum is analogous to linear momentum. It is also a vector product, similar to its torque. Consider a particle P with linear momentum "p" and a position vector with respect to the origin O. The angular momentum of the particle is denoted by "L",
L = r × d
The magnitude of the angular momentum is obtained as follows:
L = rpsinθ
Where r and p are the magnitudes of the position vector and linear momentum, respectively. The angle θ is the angle between the position vector and the linear momentum. Here, "rsin (θ)" is alsothe cross angle between the momentum and the position vector.
Relationship between Angular Momentum and Torque
The relationship between the angular momentum and torque is similar to the relationship between the force and the momentum. Force is the change in momentum of the particle. Similarly, torque is the change in angular momentum of the particle. Differentiating the formula for the angular momentum,
The angular momentum of a particle is given by
Differentiating both sides of the above equation with respect to t,
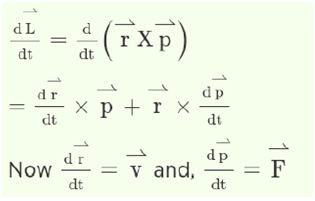
Therefore equation (A) becomes
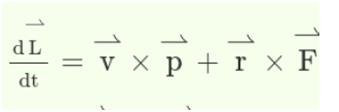 ...equation B)
...equation B)
Since
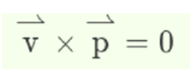
torque on the particle.
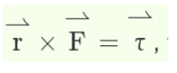
Therefore equation (B) gives
Therefore, torque on a particle is equal to the time rate of change of its angular momentum.
Let’s first understand the fundamentals of force before diving into the specifics of the moment of force. A force is an influence with the capacity to change the motion of an object. A force acting on an object with mass can cause it to accelerate or alter its velocity. An easy way to describe force is as a push or a pull. Since a force has both magnitude and direction, it is a vector quantity. It is expressed as a newton (N) in the SI system. F is the symbol used to denote force.
The rotational impact of a force is known as the moment of force, which is defined as the force times the perpendicular separation between the force and a pivot. The moment of force depends on its magnitude and the perpendicular separation between it and the pivot. The twisting impact increases as the perpendicular distance increases
The moment is the term used to describe the turning effect of a force. It is the result of multiplying the force by separating the force’s line of action and the pivot point or point at which the object will turn. The SI unit for the moment of force is the Newton-meter (Nm). It is a vector quantity.
Moment of Force Formula
The moment is defined as a force’s turning effect. It is the result of multiplying the force by the separation between the force’s line of action and the pivot point or point at which the object will turn. It is denoted byτ.
τ = F×d
Where,
τ is the moment of force
F is the force
d is the perpendicular distance between the force’s line of action.
Classification of Moment of Force
The moment of force refers to the effect of a force on a body rotating around an axis. It is equal to the product of the force’s magnitude and the line of force’s perpendicular distance from the axis of rotation. The moment of force is classified into the following categories:
· Turning moment
· Bending moment
· Twisting moment
· Turning moment
This moment causes a body to revolve around a fulcrum. The body can freely rotate around a fulcrum in this scenario.
Bending moment
This moment causes a body to bend around one of its fixed ends.
Twisting moment
This event causes a shaft to twist around one of its fixed ends.
SI Unit of Moment of Force
The tendency of a force to make a body rotate around a particular point or axis is measured by its moment of force.
Moment of force = (force) * (perpendicular distance from the pivot)
Newton is the SI unit of force, whereas a meter is the SI unit of distance. so, Newton-meter is the S.I. unit of moment of force.
The Direction of the Moment of Force
In its simplest form, a moment is created by multiplying the distance to a point by a physical quantity (such as force). It is categorized into two types based on the direction of the moment.
- Clockwise Moment
- Anticlockwise Moment
- Clockwise Moment
The moment created is referred to as a clockwise moment if force acting on a body tends to cause the body to rotate in a clockwise direction.
Anticlockwise Moment
An anticlockwise moment is created when force acting on a body has the potential to cause the body to rotate counterclockwise.
Examples of Moment of Force
A moment results from a force rotating around a pivotal fixed point. A door opening around a fixed hinge, seesaws, scissors, or a spanner revolving around a nut is a few examples.
To open and close a door, a force (push or pull) normal to the door is applied at the handle P, which is the farthest away from the hinge.
For the upper circular stone of a hand flour mill to be readily turned about the iron pivot at its center by providing a modest push at the handle, it is equipped with a handle near its rim (i.e., maximum distance from the center).
A force is exerted tangentially on the rim of the wheel to turn the steering wheel.
On a bicycle, a slight force is given to the pedal of a toothed wheel to turn the wheel counterclockwise.